UAV Development
Featured
UAV Development
Featured
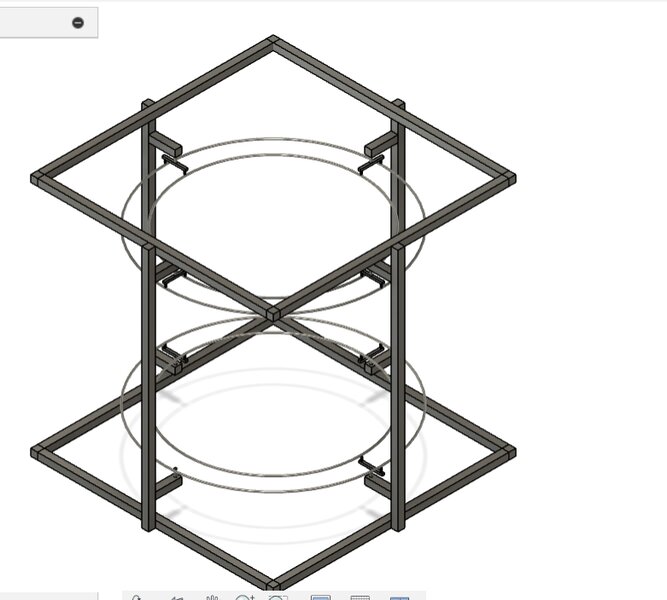
Tarot T18 Octocopter for Autonomous Water Sampling (MSc Thesis)
OngoingBuilding a heavy-lift UAV platform for autonomous water sampling in maritime research, addressing payload limitations identified in the X500 project.
ROS2PixhawkJetson Orin NanoMAVLink
+2 more